Vinzenz Reinhardt is an interaction designer and media artist.
His work investigates the intersection of art, technology and design.
 TIRESIAS
TIRESIAS 2018 self-actualising robot




TIRESIAS utilises a special form of auto-interaction, that is inspired by the self-actualising behaviour of infants. From the moment they are born, infants are exposed to information that can teach them about who they are and what world they live in. One of the first expressions of the self-actualising behaviour of babies is the tendency to explore the world using the sense of touch (Lewis et al. 1990, Moszkowski & Stack 2007). Touching themselves, as well as touching their environment grants infants a haptic impression of reality, of the self, and of the alterity of their material environment.
The significance of touching as a means of exploring and experiencing the world is elaborated by Haraway (2016) through the context of the "tentacle." Tentacle originates from the Latin noun tentaculum - meaning "feeler" - and the corresponding verb tentare - meaning "to feel" and "to try." This understanding is fundamental to TIRESIAS, as it sets the narrative, the materialisation and the behavioural aspects of the object. TIRESIAS is a self-actualising machine that tries to understand properties of itself, by physically touching parts of its own structure.
TIRESIAS' main feature is a flexible tentacle that continuously tries to touch itself in order to promote life-like qualities. Given the fact, that self-touching behaviour is especially relevant for infants, it allows for a striking parallel to be drawn to the infancy of emerging capabilities of novel machines, systems and objects. This ideology is fundamental to the design strategy of "animistic design" (Van Allen & McVeigh-Schultz 2013, Marenko & van Allen 2016), which emphasises and externalises the liveliness inherent in objects. As a result, TIRESIAS becomes an artefact to challenge Western concepts of ontology, which contemplates the notion of a severe distinction between subjects and objects, between humans and non-humans.
Its attempts to touch itself fail often, due to the fallibility of software and hardware components resulting in unpredictable circumstances. Yet, this behaviour is intended as it dissociates itself from the stereotype of perfect linear machines, thus creating the impression of an organic piece of machinery. And what is more organic, closer to reality, and more human than failures?
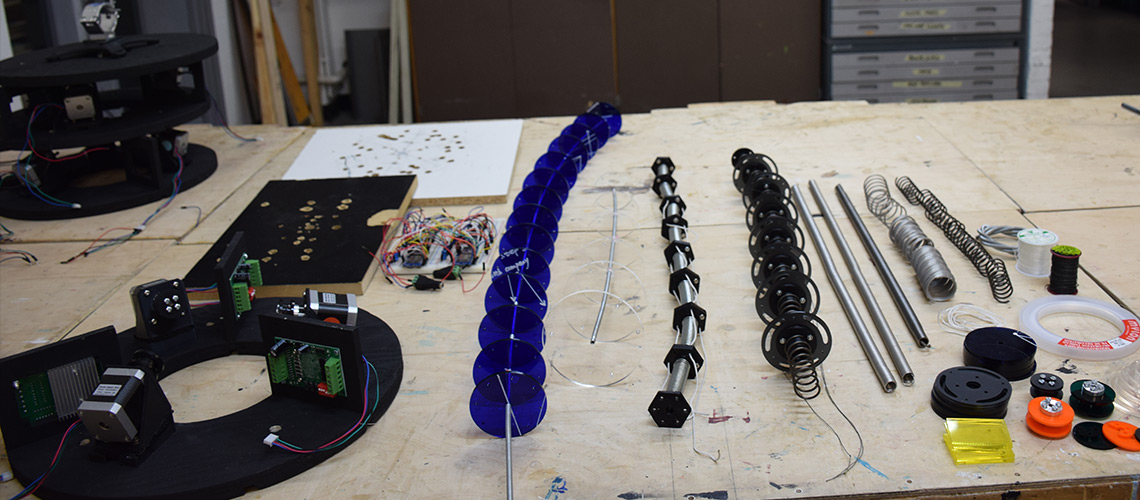

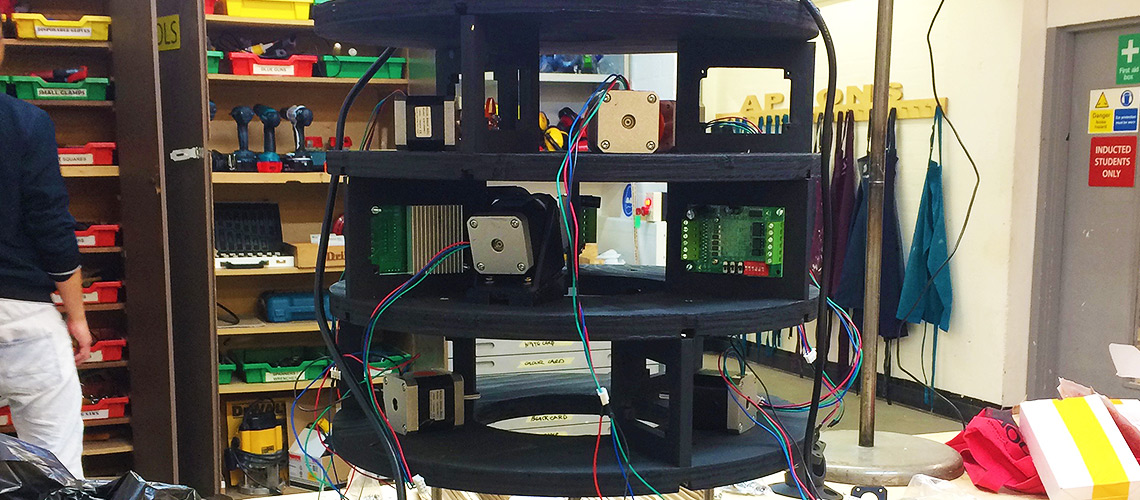

The exploration of kinetic mechanisms led to a mechanism called the „elephant trunk robot“ or „continuum robot.“ There are different variations of this mechanism, but they all have in common that they are highly manoeuvrable and consist of multiple segments which are connected to motors to make the mechanism move in a certain direction. In conclusion, the mechanism can be used within the context of auto-interactions in a way that the mechanism physically touches itself.
The experiments revealed the ambiguity of the continuum robot and its different approaches concerning the construction. There are many variables to consider, such as the spacing between segments, the number of segments, the use of compression and extensions springs, trunk hanging down, trunk standing up, the positioning of cable routing, the number of motors, various motor attachments and more.
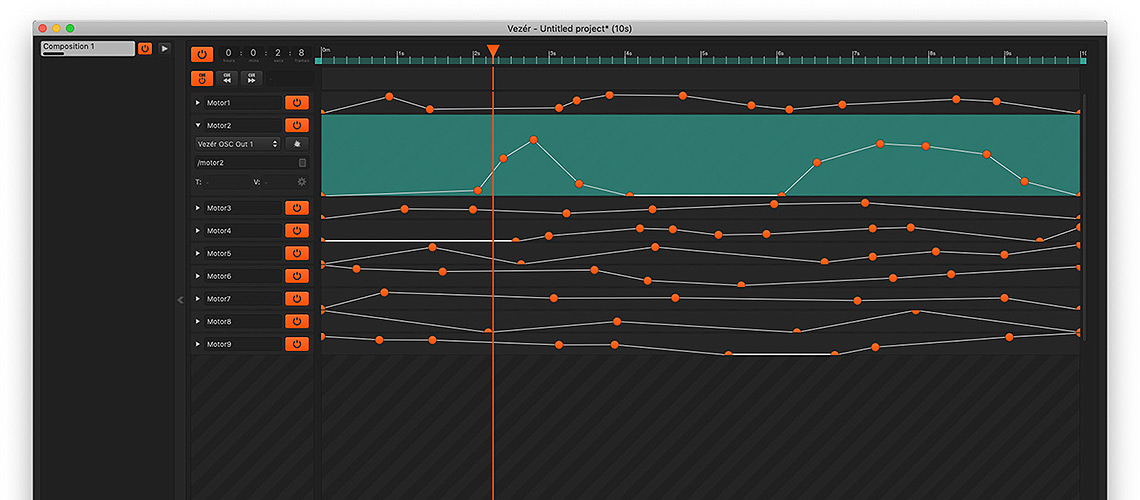
This project helped me learn about communication interfaces between systems, like the use of OSC and the transmission via UDP in a network. I also learned about inverse kinematics and its usage within Cinema 4D, even though it wasn't relevant. Through experimenting, I learned that the tentacle was unable to stick to the constraints set within the joint and rotation calculation that inverse kinematics offers. Yet, I managed to establish an interface between Cinema 4D and the robot using Python.
TIRESIAS was a collaborative effort with Eleni Xynogala, who developed her own narrative with the robot we created. She focuses on the ability of animistic objects to perform artistically especially in collaboration with human dancers. Moreover, TIRESIAS is our final project from our masters' programme at the University of the Arts in London and was exhibited in December 2018 at the London College of Communication.